第2章 弹性力学基本方程与变分原理
2.1 弹性力学基本方程
弹性力学的基本方程可分为3大类,即应力平衡方程、几何变形方程和材料的物理方程。我们先从弹性力学的二维问题入手推导3类基本方程,然后将其推广到三维问题。
2.1.1 应力平衡方程
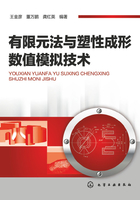
作用在等厚度t的平面单元体上的应力和单位体积上的体力如图2-1所示。

图2-1 作用在平面单元体上的力
这里逗号表示偏微分,例如σx,x=?σx/?x。下面推导单元体的平衡方程:

简化得:
同理由ΣY=0得: 
故平面应力单元体的平衡方程为:
 (2-1)
(2-1)
对于三维的情况,应力单元体的平衡方程为:
 (2-2)
(2-2)
平衡方程的矩阵形式:
 (2-3)
(2-3)
A是微分算子,
 是体积力向量,
是体积力向量, 
2.1.2 几何变形方程(应变-位移关系)
图2-2给出了一个平面问题的一般应变场,由位形o12转变为位形o'1'2'。位移u、v是坐标的函数,增量u,xdx与u或v相比是无穷小量。由定义:


图2.2 平面问题中的变形表达
同理:εy=v,y
按工程上的定义,工程剪应变为直角的改变量。在小变形条件下,β1≈tanβ1,β2≈tanβ2,

故得平面问题的应变-位移关系:
 (2-4)
(2-4)
可推广得到空间问题的应变-位移关系:
 (2-5)
(2-5)
写成矩阵形式:
ε=Lu (2-6)
其中, L=AT
2.1.3 物理方程(应力-应变关系)
由广义胡克定律,有二维平面应力情况下的物理方程:
 (2-7)
(2-7)
其逆形式为:
 (2-8)
(2-8)
式中,E为弹性模量,G为剪切弹性模量,ν为泊松比,且有以下关系:
 (2-9)
(2-9)
将以上二维平面问题的物理方程写成矩阵形式,有:
ε=cσ (2-10)
或:
σ=Dε (2-11)
这里:c=D-1
c称为材料的柔度矩阵,D称为材料的刚度矩阵。可将二维平面问题的物理方程推广到三维情况,有:
 (2-12)
(2-12)
其逆形式为:σ=Dε,定义拉梅常数:
 ,则:
,则:
 (2-13)
(2-13)
用张量形式可表示为:
Dijkl=2Gδikδjl+λδijδkl (2-14)
或:
 (2-15)
(2-15)
特殊情况讨论如下。
①平面应力 一个很薄的物体在其边界上受平面内的外载荷,这样的问题被称为平面应力问题;如图2-3(a)所示的圆环,它与中心杆件有紧配合而受内压,它为一个平面应力问题,其应力σz,τxz和τyz取为零,这时,由胡克定律可得:


图2-3 二维问题
它的逆形式为

它也常写为σ=Dε。
②平面应变 如果一个具有等截面的很长物体沿长度方向均受横向外载,如图2-3(b)所示,从中截取受有外载荷的一小段,这就可以按平面应变问题进行处理;这时εz,γzy,γyz为零,而σz不为零,其应力-应变关系可以直接推导为:
 (2-16)
(2-16)
这里D为(3×3)矩阵,它建立3个应力分量和3个应变分量之间的联系。
对于各向异性物体,若采用适当的取向主轴,也可以使用合适的D矩阵来描述材料。
2.1.4 边界条件
弹性体的全部边界用S表示。一部分边界已知外力 ,称为力边界条件,用Sσ表示;一部分边界已知位移
,称为力边界条件,用Sσ表示;一部分边界已知位移 ,称为位移边界条件,用Su表示,如图2-4所示。
,称为位移边界条件,用Su表示,如图2-4所示。

图2-4 弹性体上的力边界及位移边界
有:S=Sσ+Su
(1)力边界条件
由力学平衡方程,有力边界条件(弹性体的内力和外力平衡):
 (2-17)
(2-17)
设边界外法线方向余弦为nx、ny、nz,则边界上弹性体内力可表示为:
 (2-18)
(2-18)
弹性体上的力边界条件可用矩阵形式表示为:
 (2-19)
(2-19)
其中:T=nσ,
(2)位移边界条件
弹性体上的位移边界条件可表示为:
 (2-20)
(2-20)
用矩阵形式表示为:
 (2-21)
(2-21)
弹性力学方程记作一般形式:
平衡方程: (在V内)
(在V内)
几何方程:ε=Lu (在V内)
物理方程:σ=Dε (在V内)
边界条件:
